Hello, I am a computer engineer with a passion for research and software development.
I enjoy working on challenging problems, explore state-of-the art solutions, and help companies
deliver viable products to their customers. I am also an entrepreneur and enjoy
growing my online company TextRanch.
Getting in touch: giannigg@gmail.com
Publications
Cortina: collaborative indoor positioning using low-power sensor networks
G. Giorgetti, R. Farley, K. Chikkappa, J. Ellis, and T. Kaleas.
1) IPIN2011: International Conference On Indoor Positioning And Indoor Navigation, 21-23 September 2011,
Guimaraes, Portugal.
2) Journal of Location Based Services, 6(3), 137-160, 2012.
Cortina is a distributed Real-Time Location System (RTLS) designed to
track assets or people moving indoors. Our solution leverages
a low-cost, low-power Wireless Sensor Network (WSN) based on the
IEEE 802.15.4 radio standard. The network, which consists of
wall-plugged nodes, is designed to be self-configuring, self-healing
and self-calibrating, thus reducing deployment and maintenance costs.
Assets and people are tracked using small battery operated wireless tags
that collect Received Signal Strength (RSS) measurements from
nearby nodes. The tags also include an accelerometer for activity recognition,
and a barometric pressure sensor to detect the floor plan.
We have conducted experiments over a 2000 m 2 area instrumented with eighteen
sensor nodes. Our initial results show that the system
can track people in real-time with an average error of 2.8 m
1) Conference Paper (PDF, 597KB);
2) Journal Paper (PDF, 1.3MB)
Understanding the Limits of Collaborative RF-Based Localization
G. Giorgetti, S.K.S. Gupta and G. Manes
IEEE/ACM Transactions on Networking 2011 DOI:10.1109/TNET.2011.2141681
RF-based localization has gained popularity as a low-cost solution to support position
awareness in ad hoc networks. The received signal strength (RSS) measured by pairs of
nodes can be used to obtain either range estimates or connectivity information. It is
not clear, however: 1) when a range-based scheme should be used in favor of a connectivity-based
one, and 2) how to optimally convert the RSS into connectivity data. This paper uses
analysis of the Fisher information and the Cramér-Rao bound (CRB) to answer these questions.
Solutions are found by comparing the network connectivity against two values: the critical
connectivity (CC) and the optimal connectivity (OC). After discussing the properties of
both values, we show how their approximation can be used to improve the performance of
RF-based localization systems
PhD Dissertation
Electrical Enineering Department
Arizona State University
August 2009
Recent years have witnessed the emergence of novel application paradigms such as the Wireless Sensor
Network and Context Aware computing. Among the challenges posed by these applications, localization
– i.e. the process of locating people and/or devices – has emerged as a key problem that has found only
partial answers. Although GPS receivers are common on many consumer electronic devices, alternative solutions
are needed when locating devices that strive to be small and inexpensive, as in sensor networks, or
when supporting indoor positioning. This dissertation focuses on radio-based positioning schemes suitable
for applications where GPS is not a viable solution. [...]
Analysis and Performance of a Smart Antenna for 2.45 GHz Single-Anchor Indoor Positioning
A. Cidronali, S. Maddio, G. Giorgetti, S.K.S. Gupta, and G. Manes
IEEE Transactions on Microwave Theory and Techniques, Volume: 58, Issue: 1, Jan. 2010
This paper presents the theoretical analysis and the experimental evaluation of a
new switched beam antenna designed to operate at 2.45 GHz.
The antenna enables direction of arrival estimation using six directional planar elements arranged to form a
platonic solid geometry. It also supports polarization diversity, and it is suitable for
single-anchor indoor positioning applications. We adopt the Cramer-Rao bound to
study the estimation accuracy of the proposed antenna in absolute 2-D target positioning using
received signal strength measurements. First, we describe the design principles for the radiators,
we provide an extensive characterization of the switched antenna prototype, and we discuss
positioning applications. We then report experimental data that support the results of the
theoretical analysis and show consistency between theoretical expectation and the measurements.
Finally, we discuss results from proof-of-concept operative indoor positioning example, showing an
average localization error as low as 1.7 m.
Switched Beam Antenna Design Principles for Angle of Arrival Estimation
G. Giorgetti, S. Maddio, A. Cidronali, S.K.S. Gupta, and G. Manes
EuMW2009: The 39th European Microwave Conference 2009. Rome, 29 September - 1 October 2009
Switched Beam Antennas support radio positioning
via Angle Of Arrival (AOA) information collected from nearby
devices. Using an analytical approach, first we present the
Cramér-Rao Bound (CRB) for AOA estimates using identically
and equally spaced antenna elements. Then we analyze the results
to devise design guidelines for improved AOA estimation. The
design parameters considered are: 1)the number of antenna
elements, 2) their directivity, and 3) the type of polarization.
The effect of each parameter is discussed in detail; additionally,
experimental results at 2.45 GHz are reported to evaluate the
effect of different antenna polarization on the CRB.
A 2.45 GHz Smart Antenna for Location-Aware Single-Anchor Indoor Applications
A. Cidronali, S. Maddio, G. Giorgetti, I. Magrini, S.K.S. Gupta, and G. Manes
IMS2009: International Microwave Symposium, 7-12 June 2009, Boston.
This paper proposes a new switched beam array
optimized for 2.45 GHz wireless indoor applications. The antenna
supports directional communication to enable spatial reusability,
and polarization diversity to mitigate multipath propagation. It
also supports absolute 2D target localization using measurements
from a single anchor node. The paper describes the antenna design,
the implementation and the experimental characterization,
along with its positioning applications. The localization results
obtained with data collected from indoor measurements, showing
an average localization error as low as 1.7 m.
Single-Anchor Indoor Localization Using a Switched-Beam Antenna
G. Giorgetti, A. Cidronali, S.K.S. Gupta and G. Manes
IEEE Communications Letters, Vol. 13, No. 1, January 2009
We propose a RF-based localization system that works using a single anchor node.
The anchor is equipped with a switched-beam directional antenna that installs on
the ceiling of a room and collects signal strength information sufficient for absolute
2D target positioning. Indoor measurements are used to show satisfactory localization
results with range-free (proximity), range-based and fingerprinting schemes.
Range-Free Localization in Sensor Networks: Handling Heterogeneous Scenarios
G. Giorgetti, S.K.S. Gupta and G. Manes
Submitted to ACM Transactions on Sensor Networks - never heard back from them... :-)
Implementing a localization service for a wireless sensor network
is a challenging task. Sometimes the nodes are deployed in sparse
topologies, while other times they are densely packed inside a building.
Some environments are relatively uncluttered, while others have
obstacles that impede the node placement and strongly affect the
radio signal. To address the problem of localization in heterogeneous
scenarios, we present a range-free scheme based on the neural network
paradigm of Self-Organizing Maps (SOM). This method is lightweight,
works with or without anchor nodes, and has proven effective in
a variety of simulated scenarios. We propose three variants (SOM-V,
SOM-A and SOM-R) that achieve accurate results in sparse topologies
but are also suitable to localize nodes in dense networks or deployments
with anisotropic layout. We evaluate the localization results using
extensive simulations, comparisonswith other range-free techniques,
Cramér-Rao bound analysis and test cases with data from in-field
measurements. Finally, we demonstrate analytically that the proposed
scheme has low computation and communication overheads, making it
suitable for resource-constrained networks.
Localization Using Signal Strength: To Range or Not To Range?
G. Giorgetti, S.K.S. Gupta and G. Manes
MELT 2008: The First ACM International Workshop on Mobile Entity Localization and Tracking in GPS-less
Environments, September 19, San Francisco. (Best Paper Runner Up)
Received Signal Strength (RSS) data collected within a wireless network
can be used to obtain either range estimates or connectivity information.
Both approaches lead to localization schemes that require no additional
hardware. It is not clear, however, when a range-based scheme should be
used in favor of a connectivity-based one. We use analysis of the Fisher
information and the Cramér-Rao Bound (CRB) to characterize the
error of both approaches. We find the existence of a critical connectivity
value below which using a RSS data for range-based localization is counter-productive.
We show that an approximation of the critical connectivity value can be
computed as a function of the network size and the parameters of the propagation
model.
Paper (PDF, 336 KB),
Presentation (PPT, 3.2 MB),
BibTex
Optimal RSS Threshold in Connectivity-Based Localization Schemes
G. Giorgetti, S.K.S. Gupta and G. Manes
MSWIM 2008: The 11-th ACM International Conference on Modeling, Analysis and Simulation of Wireless and Mobile Systems, October 27 - 31, 2008, Vancouver, Canada.
Connectivity-based localization schemes compute the node
positions using proximity information collected within the network.
In many cases of practical interest, Received Signal Strength (RSS)
measurements are available, and connectivity data can be obtained
by comparing the RSS against a threshold.
We use the Cramér-Rao bound (CRB) analysis to determine the
threshold value that minimizes the localization error.
The CRB is based on knowledge of the propagation model's parameters
and the true node positions. Since this information is not
available to a localization scheme, we approximate the optimal
threshold value using a function that depends only on the number
of nodes in the network. We use extensive simulations and RSS data
from in-field experiments to validate the results of the proposed
approach.
Paper (PDF, 707 KB),
Presentation (PPT, 9.11 MB),
BibTex
Wireless Sensor Networking for “Hot” Applications:
Effects of Temperature on Signal Strength, Data Collection and Localization
K. Bannister, G. Giorgetti and S.K.S. Gupta
HotEmnets'08: The Fifth Workshop on Embedded Networked Sensors, June 2-3, 2008, Charlottesville, Virginia, USA.
We measured the attenuation of signal strength for Telos-class motes between 25°C to 65°C, with a maximum loss of 8 dB at 65°C.
A linear model for the combined reduction of the transmit power and receiver sensitivity is presented,
which suggests significant impact on the transmission range and network services. Path loss and link budget
analysis indicate a communication range reduction of up to 60%. Network simulations show that the maximum
range reduction severely decreases average node connectivity and disrupts multihop data collection.
When the received signal strength (RSS) values are used for localization without temperature compensation,
ranging error increases by up to 150%. Moreover, Cramér-Rao Bound (CRB) analysis shows that even when the
RSS values are compensated, localization errors increase as a result of reduced connectivity
Resource-Constrained Localization in Sensor Networks
G. Giorgetti
PhD Thesis - March 2007
Universitá Degli Studi di Firenze, Dept. of Electronics and Telecommunications
In sensor networks applications, localization is an essential service
that computes the node positions on the basis of a limited amount of initial
information. The task is particularly challenging in resource-constrained
deployments typical of many real-world applications, where nodes have
reduced computational capabilities, do not have hardware for range measurements,
and operates in sparse topologies. In this thesis we propose a range-free,
anchor-free solution that works using connectivity information only. The
approach, suitable for deployments with strict cost constraints, is based
on the neural network paradigm of Self-Organizing Maps (SOM). We present
a lightweight SOM-based algorithm to compute virtual coordinates that
are effective for location-aided routing. If absolute coordinates are
required, this algorithm can efficiently exploit information of few anchor
nodes to compute absolute maps. Results of extensive simulations show
improvements over the popular Multi-Dimensional Scaling (MDS) scheme,
especially for networks with low connectivity, which are intrinsically
harder to localize, and in presence of irregular radio pattern or anisotropic
deployment. We analytically demonstrate that the proposed scheme has low
computation and communication overheads; hence, making it suitable for
resource-constrained networks.
In the second part of this work, we introduce a directional antenna designed
to operates with COTS sensor nodes. After using experimental tests and
theoretical models to characterize the communication improvements, we
implement a simple algorithm that exploits the directivity of the antenna
to estimate the angular position of nearby nodes. Experimental results
demonstrate that an inexpensive and compact antenna can be used to derive
angle information useful in solving the localization problem.
G. Giorgetti, A. Cidronali, S.K.S. Gupta and G. Manes
European Microwave Conference, 8-12 October 2007, Munich, Germany
Motivated by recent interest in directional antennas for WSNs, we propose
a Four-Beam Patch Antenna (FBPA) designed to meet the size, cost and complexity
constraints of sensor nodes. We use in-field experiments with COTS motes
to demonstrate substantial benefits to WSN applications. Used outdoors,
the FBPA extends the communication range from 140m to more than 350m,
while indoors it suppresses the interference due to multipath fading by
reducing the signal variability of more than 70%. We also show interference
suppression from IEEE 802.11g systems and discuss the use of the antenna
as a form of angular diversity useful to cope with the variability of
the radio signal. Experimental data are analyzed to derive model parameters
intended for use in future network simulations.
The Personal Sensor Network: a User-Centric Monitoring Solution
G. Giorgetti, G. Manes, J.H. Lewis, S.T. Mastroianni and S.K.S. Gupta
BodyNets07: The 2nd International Conference on Body Area Networks, 11-13 June 2007, Florence, Italy
Server-based architectures used in traditional Wireless Sensor Network (WSN) applications are not
suitable when the sensors are installed near the user and local access is desirable.
We address this problem by proposing the Personal Sensor Network (PSN), a computer-less architecture
that enables users to access the sensor data using their cell phones or any other Bluetooth
enabled devices. The use of COTS hardware and widely available software resources results in a solution
easy to implement and simple to interface with other WSNs.
Paper (PDF, 131 KB),
Presentation (PPT, 7'025 KB),
Video (WMV, 26'614 KB)
Wireless Localization Using Self-Organizing Maps
G. Giorgetti, S.K.S. Gupta and G. Manes
IPSN07: The Sixth International Conference on Information Processing in Sensor Networks, 25-27 April 2007, Boston, MA
Localization is an essential service for many wireless sensor network applications. While several
localization schemes rely on anchor nodes and range measurements to achieve fine-grained positioning,
we propose a range-free, anchor-free solution that works using connectivity information only.
The approach, suitable for deployments with strict cost constraints, is based on the neural network
paradigm of Self-Organizing Maps (SOM). We present a lightweight SOM-based algorithm to compute virtual
coordinates that are effective for location-aided routing. This algorithm can also exploit the location
information, if available, of few anchor nodes to compute absolute positions. Results of extensive
simulations show improvements over the popular Multi-Dimensional Scaling (MDS) scheme, especially for
networks with low connectivity, which are intrinsically harder to localize, and in presence of irregular
radio pattern or anisotropic deployment. We analytically demonstrate that the proposed scheme has low
computation and communication overheads; hence, making it suitable for resource-constrained networks.
Paper (PDF, 1'118 KB),
Poster (PDF, 805 KB),
BibTex
Projects
These are some projects I have worked on during the years. I am currently collecting more details
about few ones that are missing from the list. Come back soon.
Montage of Sentinel footage under a variety of condition.
See here (video) for a side-to-side comparison with
Amazon AWS Video Rekognition
Accuware Sentinel
This research is part of a project that is now commercialized by Accuware Inc. under the name
Sentinel. The software
implements pedestrian detection and tracking and it’s capable of following multiple people even through
occluded scenes. There were two big research challenges related to the commercialization of this
technology. The first challenge was to make it robust enough so that it could perform under a variety of
conditions. We have customers from all around the world and no two videos are similar in terms of scene,
angle, lighting etc. In addition, this technology is supposed to perform well “out of the box”, without
special calibration or tuning that can be afforded in some research settings. The second challenge was how
to optimize the computation so that several streams could be analyzed by a single machine with reasonable
cost.
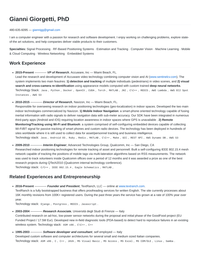
Navigation results in a open-space office measuring approximately 40x50 meters and containing 8
iBeacons. Blue dot = true position (pedestrian walking at a normal pace), Red dot = computed position.
Smart-Phone Navigation using iBeacons (Radio Only)
One of the latest projects implementing indoor navigation on a smart-phone. While in some previous projects I
leveraged inertial readings from the phone’s sensors, in this case the positioning is achieved using
radio signals only, in particular Bluetooth signals generated by nearby iBeacons. Radio-based
positioning is notoriously prone to large errors when operating in open space environments with low
signal attenuation. To improve the results, a discrete Bayes filter was implemented to estimate the phone's position.
Extra care was taken to optimize the computation in such a way that the filter update and prediction could be performed in
real-time. This solution was extensively tested in open space environment containing 8
iBeacons and yield a position error less than 2m in 80% of case. Removing the reliance from the
inertial sensors make this technology suitable to operate in a large variety of conditions (e.g. phone
inside your pocket or purse).
Computer Vision Applied to Pedestrian Tracking
One of my first experiment in using computer vision for pedestrian tracking. Here the software is
running on a popular benchmark video from the PETS-S2L1 challenge. The software is running in real-time
at 30FPS+ on an Intel Core5 processor. The detections are performed via background subtraction matched
against an occupancy grid that covers the analysis area. While this technique showed good initial
results on a few test videos, it proved to be not robust enough for more complex scenes with more
challenging illumination.
Smart-Phone Navigation using Dead Reckoning
This is a smart-phone application showing the result of a 2 minute walk inside a shopping mall. The
initial position, including the initial heading, are set at the beginning of the walk. Then the position
is computed by analyzing the inertial sensors of the phone (accelerometer and gyro) to determine speed
and direction of the movements. There is very little drift during this walk, which you will notice if
you watch the end of the video where I come back to the initial position and the phone shows a closed
loop on screen.
Phone positioning via computer vision matching
This is a proof of concept application running on Android OS and showing very accurate positioning
(error < 0.5 m) using computer vision to match a template image at a known location. Matching the image
provides a way to estimate the phone’s pose (its orientation in space) and the distance from the image
itself. If the image is at a known position, like in this case, all the information can be combined to
calculate the absolute position of the phone with a single shot.
Indoor Navigation using WiFi signals and inertial sensing
This is a mobile application written for Android OS that uses a particle filter to fuse information from
nearby WiFi access points and inertial sensors. The sensors used are: 1) magnetometer (compass) to obtain
heading information (but it’s not very accurate indoors), 2) gyroscope to detect turns (very accurate)
and 3) accelerometer to detect steps. The initial position is obtained using WiFi only and it is
progressively refined as the particle filter is able to match the inertial information from the sensor
with the physical layout of the building.
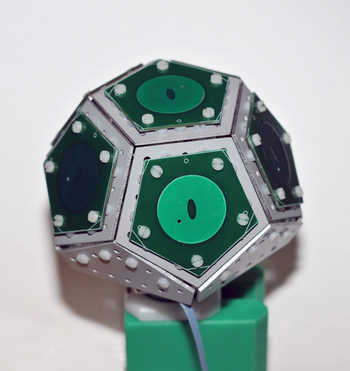
The switched-beam directional antenna in the figure was developed in collaboration with the
MicLab at the Universitá degli Studi di Firenze. The antenna implements an indoor localization
system that works using a single anchor node. Thanks to the 3D arrangement of the faces, the system can
estimate both the azimuth and elevation Angle of Arrival (AOA) of the messages transmitted by a target
node. The AOA information collected by the antenna is sufficient for absolute 2D target localization and
tracking. A
paper
describing the antenna's applications was published on the IEEE Communications Letters.
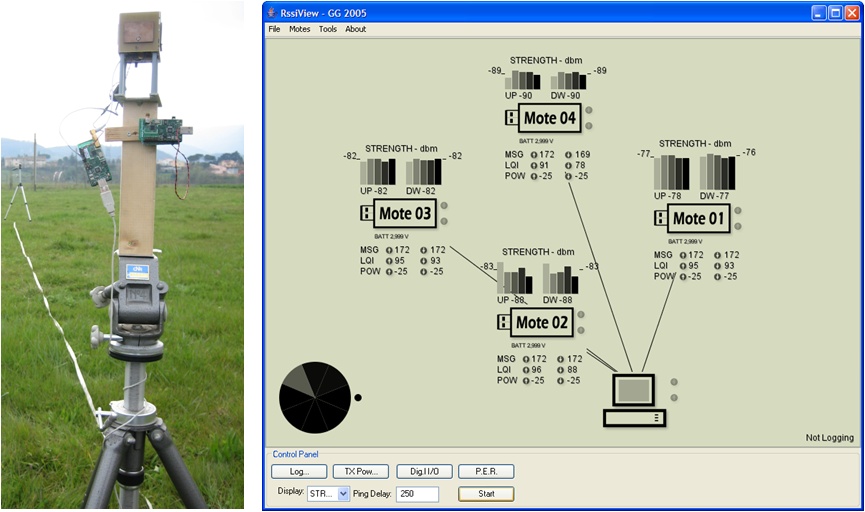
This is an indoor-localization application developed in collaboration with Intel Corp. The goal is to
track a mobile target in a dense sensor deployment with 50 anchor nodes. Despite the large number of
reference devices, multi-path propagation due to reflections from the metallic walls makes localization
challenging. We are currently investigating and comparing different localization techniques. Preliminary
results are available here.
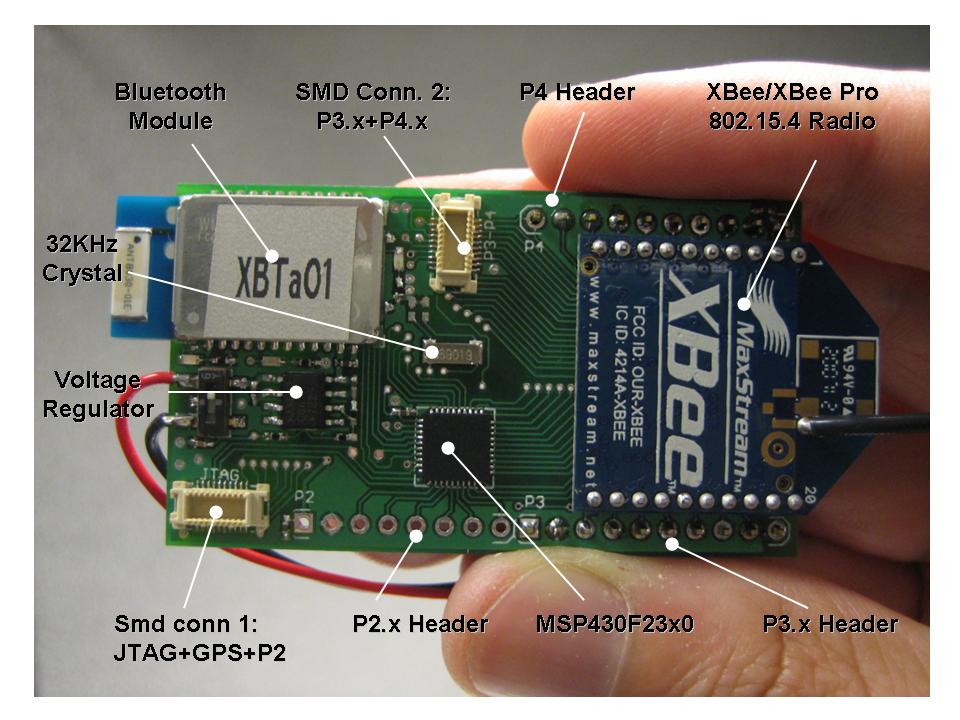
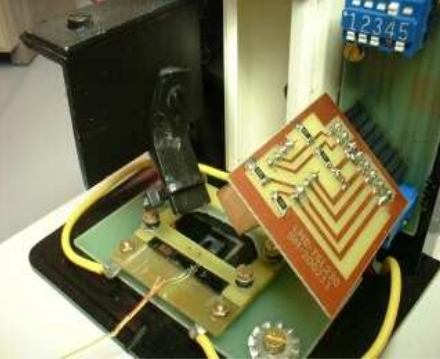
Board for Indoor Localization
I designed this board during the 2007 summer internship at Motorola Labs, Tempe, AZ. The module
contains a low power 16-bit microcontroller (TI MSP430F23x0), an IEEE 802.15.4/ZigBee compatible radio
(Maxstream XBee/XBee Pro), and a Bluetooth transceiver (BlueRadios BR-C40A). The board is designed to
support indoor localization. In particular, the two radios can be used to localize both sensor nodes
(using the XBee radio) and mobile users carrying Bluetooth enabled devices (using the BR-C40A radio).
Networking software to support multi-hop routing is written in C++/Assembler.
Range-Free Localization Using Self-Organizing Maps
The Self-Organizing Map (SOM) is a neural network paradigm that has found numerous applications in the
context of exploratory data analysis, pattern recognition and vector quantization. The SOM technique
also implements a natural solution to the problem of estimating the node positions in ad-hoc networks
using connectivity data. The SOM approach is lightweight, works with or without anchor nodes, and has
proven effective in a variety of simulated scenarios. A paper describing the SOM solution applied to
localization is available
here
.
In many Wireless Sensor Network applications a PC collects the information gathered by the sensors and
displays the results to the user. During my 2006 summer internship at Motorola Labs, Tempe, AZ, I worked
on a project where the PC is replaced by a phone. The connection between the phone and the WSN is made
possible by a Bluetooth Radio module installed on one of the sensor nodes. Sensor data such as
temperature, light, battery voltage, CO2 level, and received signal strength are displayed in real-time
on the phone's screen. The application on the phone is written in J2ME; in addition to visualization
purposes, it allows sending commands to the wireless network (e.g. to change the sampling period of the
nodes). A short paper describing the project can be found here.
Angle of Arrival Estimation using Directional Antennas
This software implements a system for Angle of Arrival estimation using commercially available sensor
nodes (TelosB) and a directional antenna. A description of the antenna can be found here. The software
running on the sensor boards, written in nesC/TinyOS, enables collection of Received Signal Strength
(RSS) measurements through bursts of radio messages exchanged on the four antenna faces. By comparing
the RSS values with the radiation patterns of the antenna, the direction of the incoming signal can be
estimated. In our experiments we used the Multiple Signal Classification (MUSIC) technique and a custom
implementation of a Least Squares estimator. In environments without strong multi-path components, the
system is able to estimate the angle of the transmitting node with an average error as low as 5-6
degrees.
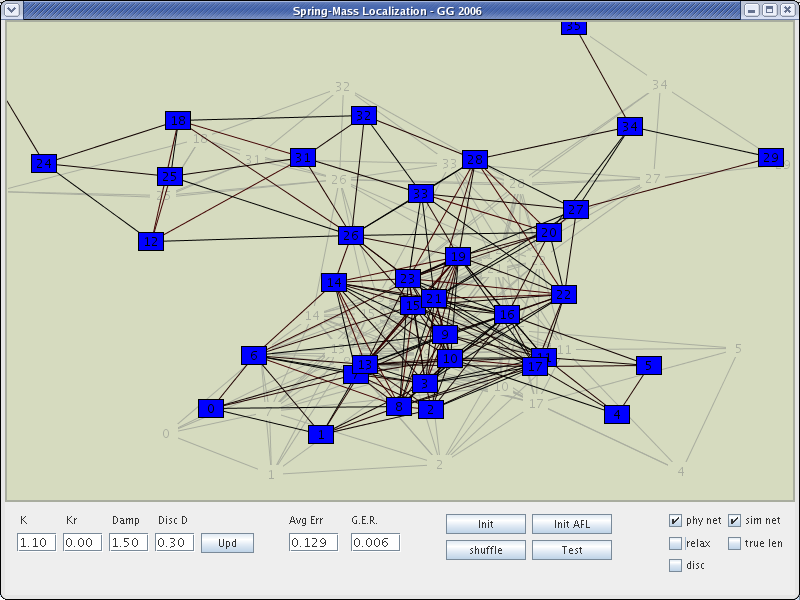
The term Localization, or Geolocation, refers to the task of computing the position of a set of sensors
when GPS is not available. To this purpose, a set of proximity constraints or distance measurements are
collected between neighbor nodes. In this localization solution, the sensor network is modeled as a mesh
of masses connected by springs. Each mass point represents a sensor node, while each spring connecting
couple of nodes represents the available measurement (proximity or distance estimates). The node
positions are computed by iteratively relaxing the forces that acts on the masses.
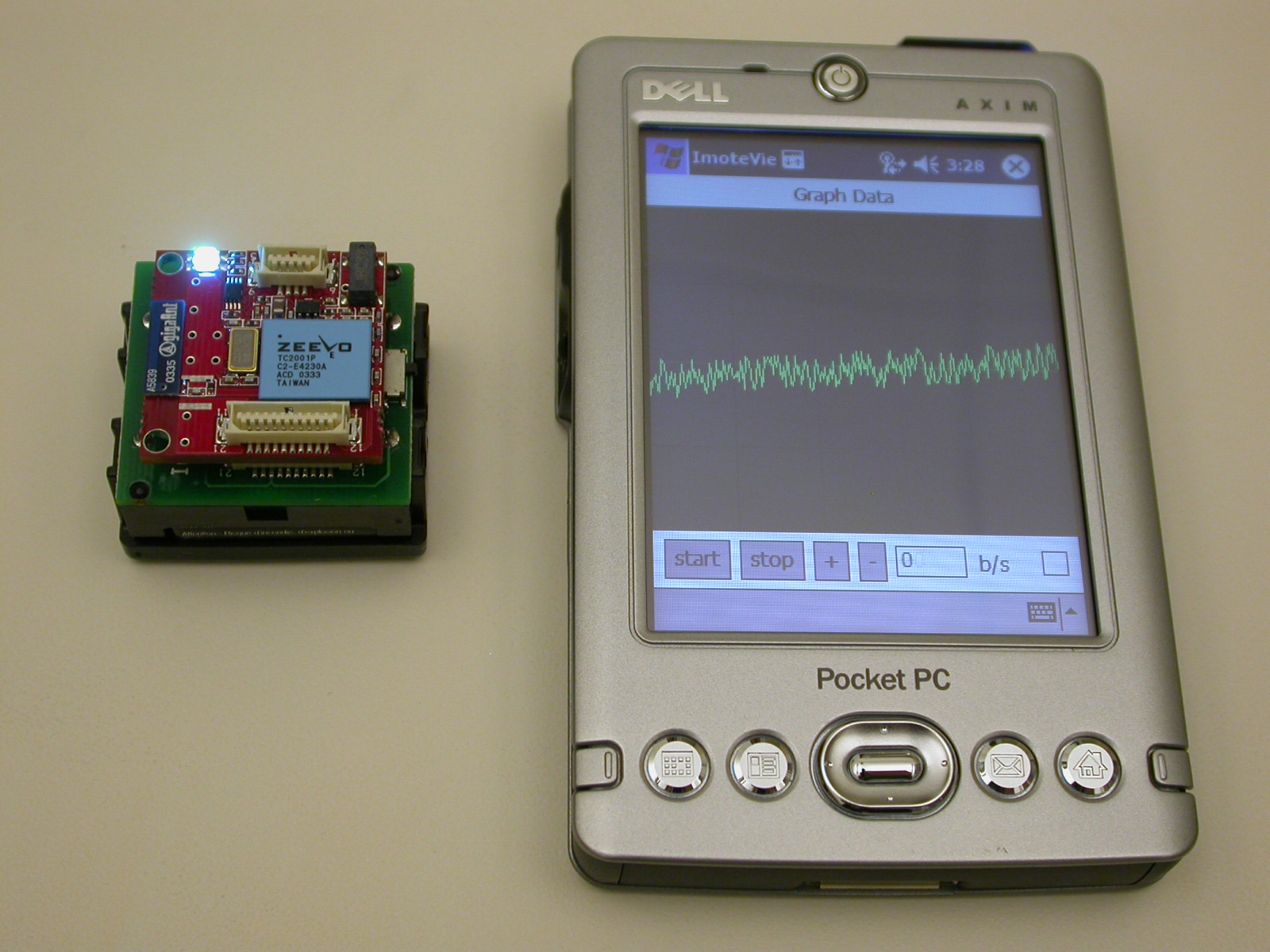
In this demo application an Intel Imote is used to demonstrate Bluetooth connectivity with a PDA. The
mote generates random data (think about that as possible sensor readings) that are displayed in
real-time on the PDA's screen (Dell Axim x30). The software running on the Imote, written in nesC,
contains a custom implementation of the Bluetooth Service Discovery Protocol (SDP). Other layers of the
Bluetooth stack were implemented by Intel Research groups. The software running on the PDA is written in
Java. The Java Virtual Machine running on the PDA is the J9 from IBM.
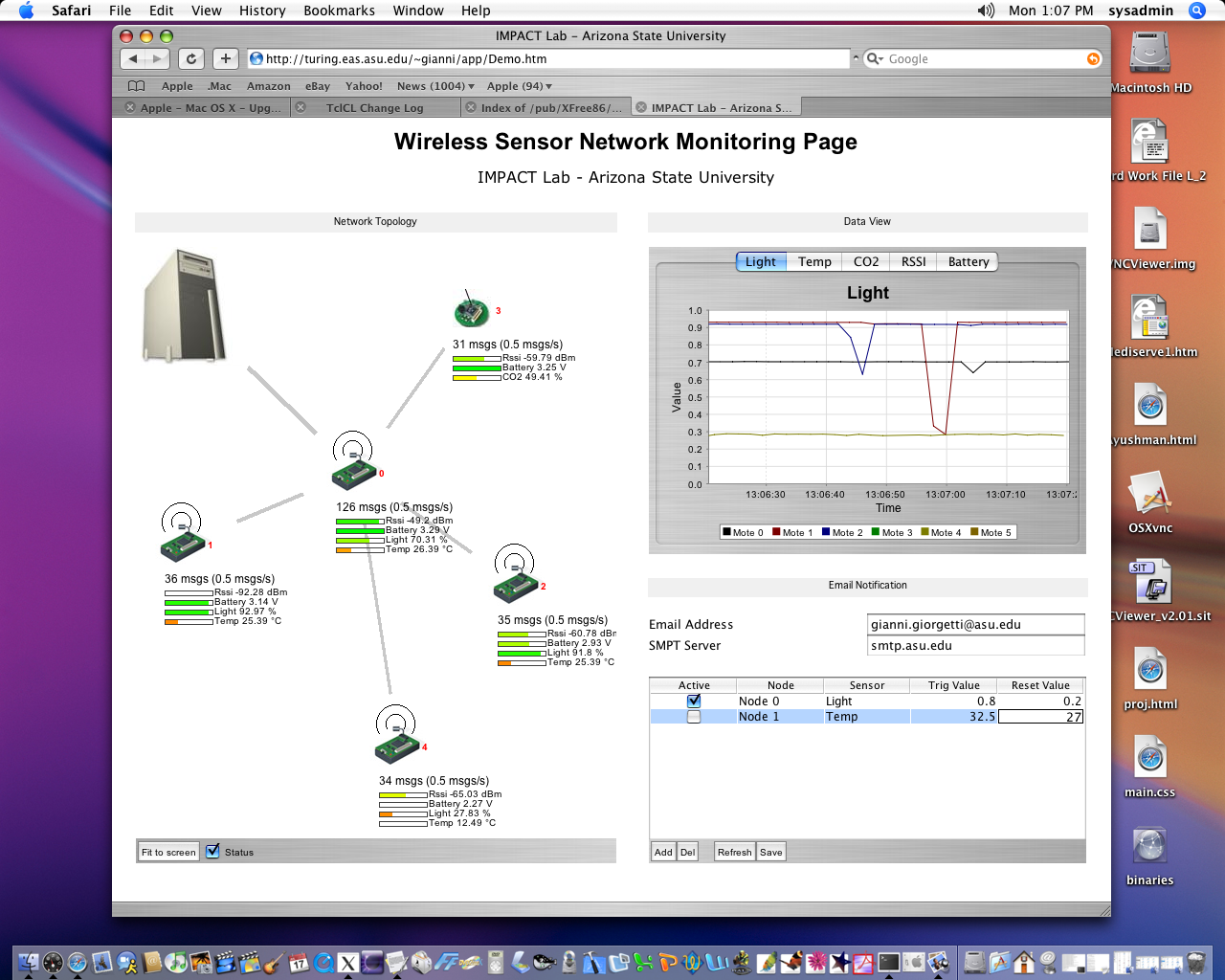
Web-Based Remote Monitoring Application
Three Java applets embedded in an HTML page are used to show sensor data collected by a remote Wireless
Sensor Network. The first applet provides a graphical representation of the network topology. It shows
the routes used by each sensor to forward the data to the base station. The second applet displays real
time plots of the sensed values: temperature, light, CO2 level, battery Level, and Received Signal
Strength (RSS). Finally, the third applet generates automatic email alerts when some of the sensor
readings trigger user-defined thresholds.
NirEditor
NirEditor is an XML editor for legislative drafting developed within the NIR (Norme in Rete) project.
The software, implemented in collaboration with a research group at the ITTIG-CNR, is a tool that
simplifies editing and maintenance of complex legal documents. The editor ensures compliance with the
Document Type Definition (DTD) used to standardize electronic accessible documents in the Italian
guiridic system.
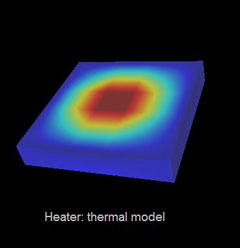
This software uses a custom implementation of the Finite Element Method (FEM) to simulate
transient heat propagation in 3D structures. It has been used to simulate
the thermal processes that regulate the DNA amplification reaction,
Polymerase Chain Reaction (PCR). The simulator can also be used as a tool to optimize the
design of new heaters and reaction chips for PCR. The software includes a simple
mesh generator tools and 2D/3D viewers for the simulated thermal processes. A VRML module is used to
provide interactive models of the three-dimensional structures interested by heat propagation.
This application provides a platform for the thermal control of PCR in plastic micro-devices. The
system has been effectively used to regulate fast thermal processes (up to 30C/s), thus significantly
reducing the time required by the DNA amplification. Along with the control functionalities, analysis
and benchmark tools are included to facilitate development of more efficient PCR solutions. A flexible
reaction protocol management is available.
Temperature Control Via Reinforcement Learning
The term Reinforcement Learning (RL) refers to a class of algorithms that dynamically learn to
solve a problem. Differently from other supervised techniques, the training is not based on samples.
Reinforcement learning relies on a reward function that measures how well the solution is performing.
The application in the figure uses RL to control the temperature of an unknown system. The goal is to
reach the setpoint in the shortest time possible and limiting the overshoot. This was a preliminary
study to implement an embedded temperature controller for the Polymerase Chain Reaction (PCR) project
described here.
Communicating Modular Timed Petri Networks Editor
Communicating Modular Timed Petri Networks (CMTPN) are oriented graphs used to model concurrent
systems. They are often used to simulate and verify systems subjected to complex temporal constraints.
This editor has been developed as a tool for the visual editing of large CMTPNs. An intuitive GUI and
a rich set of editing functionalities (cut, copy, paste, drag and drop, undo, redo, ...) has been
implemented to facilitate the editing of CMPTN drawings.
Speaker Verification using CHMM
This project relies on Continuous Hidden Markov Models (CHMM) to implement a Speaker Verification
algorithm. The application's goal is to authenticate users’ identity by analyzing their voices. A few
utterances of a test phrase are needed to train the system. The vocal signal is first processed with a
FFT-based algorithm for the extraction of a set of characterizing features. The features are then used
to train the CHMM and create a statistical model describing the user's speech. During the verification
phase the user is requested to repeat the test phrase, which is matched against the stored model to
verify the claimed identity.
Caption Detection
This Video Analysis software was created to discover the presence of text captions within digital
videos. Each frame is analyzed with a heuristic algorithm to quickly identify block of texts
superimposed on the images. A database containing the caption images and their temporal location is
created as result of the analysis.
Video Spot
This software was created for a subtitling company who needed a tool for the temporal synchronization
of subtitles with digital video. The application implements a graphical user interface that allows to
interactively change the position of subtitles using scrollable timeline.
Automatic Speech Recognition
The Speech Recognition task consists in the conversion of a speech signal into text. This software
implements a Speech Recognition algorithm that uses Neural Networks and a preprocessing algorithm based
on FFT (Fast Fourier Transform) for the extraction of significant parameters from the vocal signal.
The neural networks are initially trained using the features extracted from short segments of voice
containing several utterances of the different phonemes composing the Italian language. After the
initial training phase, the software can be use to process longer speech sample that are then converted
into text. The software is user-dependent, so it can only recognize the voice of the user who trained
the system.
An algorithm based on fractal geometry is used to create random topological maps. These maps are then
rendered using 3D techniques that produce realistic images of virtual landscapes. The images shown here
were created using a 80286 PC with 1MB of RAM and a video card capable of 640x480 w 256 colors.
* G. Giorgetti, R. Farley, K. Chikkappa, J. Ellis, and T. Kaleas. _Cortina: collaborative indoor positioning using low-power sensor networks_. Journal of Location Based Services, 6(3), 137-160, 2012.
* G. Giorgetti, S.K.S. Gupta, and G. Manes. _Understanding the Limits of Collaborative RF-Based Localization_. Networking, IEEE/ACM Transactions on, 19(6), 1638-1651, 2011.
* A. Cidronali, S. Maddio, G. Giorgetti, and G. Manes. _Analysis and performance of a smart antenna for 2.45-GHz single-anchor indoor positioning_. Microwave Theory and Techniques, IEEE Transactions on, 58(1), 21-31, 2010.
* G. Giorgetti, S. Maddio, A. Cidronali, S.K.S. Gupta, and G. Manes. _Switched Beam Antenna Design Principles for Angle of Arrival Estimation_. IEEE EuMW2009.
* G. Giorgetti, A. Cidronali, S.K.S. Gupta, and G. Manes. _Single-Anchor Indoor Localization Using a Switched-Beam Antenna_. IEEE Communications Letters, Vol. 13, No. 1, January 2009.
* G. Giorgetti, S.K.S. Gupta, and G. Manes. _Optimal RSS Threshold in Connectivity-Based Localization Schemes_. ACM MSWiM’08.
* K. Bannister, G. Giorgetti, and S.K.S. Gupta. _Wireless Sensor Networking for Hot Applications: Effects of Temperature on Signal Strength, Data Collection and Localization_. HotEmnets’08.
* G. Giorgetti, A. Cidronali, S.K.S. Gupta and G. Manes. _Exploiting Low-Cost Directional Antennas in 2.4GHz IEEE 802.15.4 Wireless Sensor Networks_. IEEE EuMW’07.
* G. Giorgetti, G. Manes, J.H. Lewis, S.T. Mastroianni and S.K.S. Gupta. _The Personal Sensor Network: a User-Centric Monitoring Solution_. BodyNets’07.
* G. Giorgetti, S.K.S. Gupta and G. Manes. _Wireless Localization Using Self-Organizing Maps_. ACM IPSN’07.